RoboHeartBalanceBotControl
Quote from AS59DE on October 30, 2024, 2:53 pmHallo,
bin nun am Experimentieren. RoboHeartBalanceBotControl.ino
Habe hier ein Balancing Bot zusammengebaut.Funktioniert soweit, auch mit der App als Fernsteuerung.
Ist aber noch sehr wild 😉
Nun werde ich es noch versuchen es mit der RoboHeartPIDFittingExample.ino
zu konfigurieren.
Frage 1:
Muss das Board zum laden des AKKU eingeschaltet bleiben?
Ich habe es jetzt immer zum laden eingeschaltet und die Motore abgeklemmt.
Dann müsste ich im fertigen Projekt ein Schalter zum ausschalten der Motore
einplanen.
Frage 2:
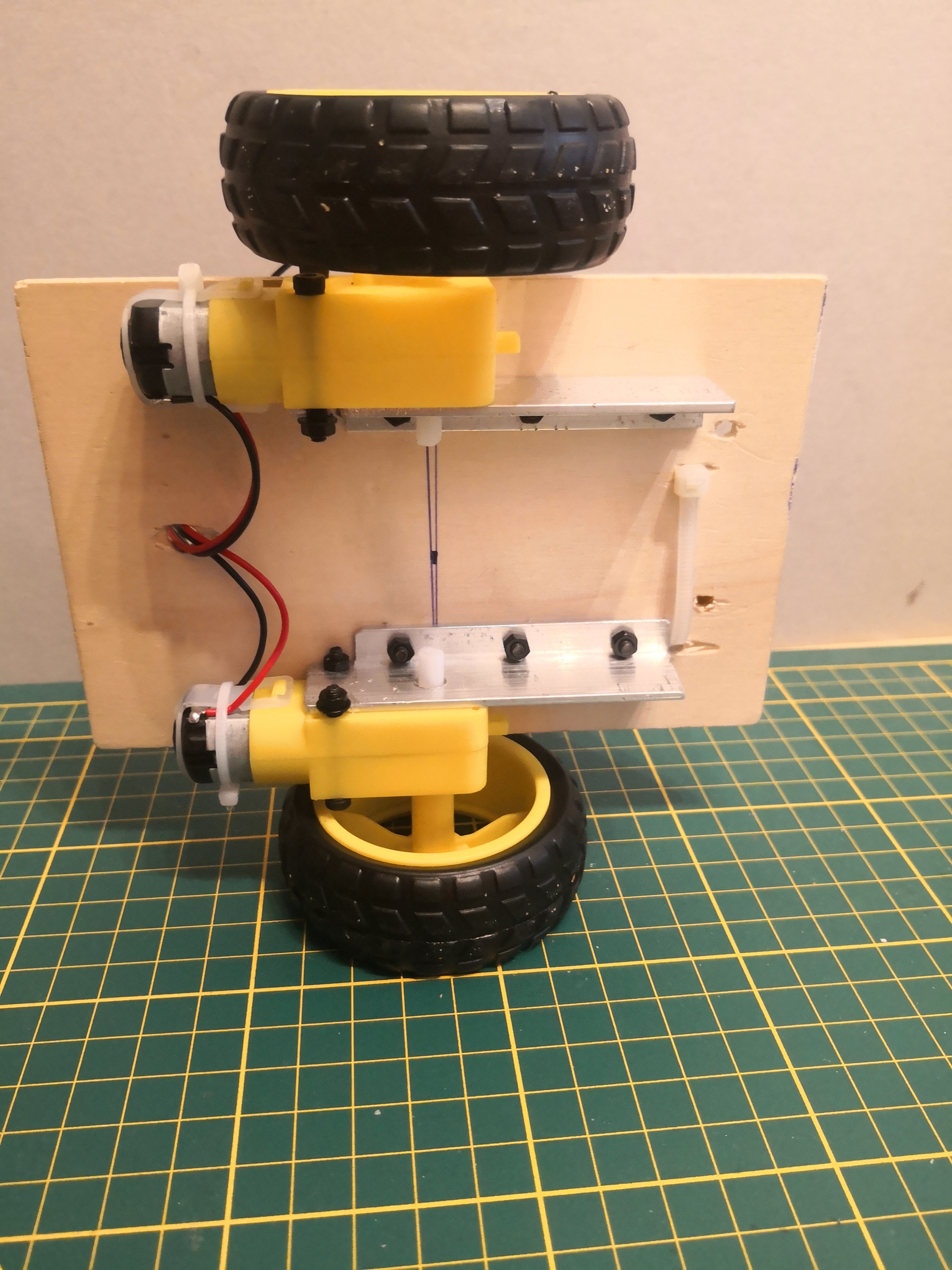
Habe jetzt eine flache Bauweise gewählt,
währe es besser es auch in zwei Etagen zubauen?
Das Board würde dann im anderen Radius zur Achse liegen
und sich vielleicht besser konfigurieren lassen?LG AS59DE
Hallo,
bin nun am Experimentieren. RoboHeartBalanceBotControl.ino
Habe hier ein Balancing Bot zusammengebaut.
Funktioniert soweit, auch mit der App als Fernsteuerung.
Ist aber noch sehr wild 😉
Nun werde ich es noch versuchen es mit der RoboHeartPIDFittingExample.ino
zu konfigurieren.
Frage 1:
Muss das Board zum laden des AKKU eingeschaltet bleiben?
Ich habe es jetzt immer zum laden eingeschaltet und die Motore abgeklemmt.
Dann müsste ich im fertigen Projekt ein Schalter zum ausschalten der Motore
einplanen.
Frage 2:
Habe jetzt eine flache Bauweise gewählt,
währe es besser es auch in zwei Etagen zubauen?
Das Board würde dann im anderen Radius zur Achse liegen
und sich vielleicht besser konfigurieren lassen?
LG AS59DE
Uploaded files: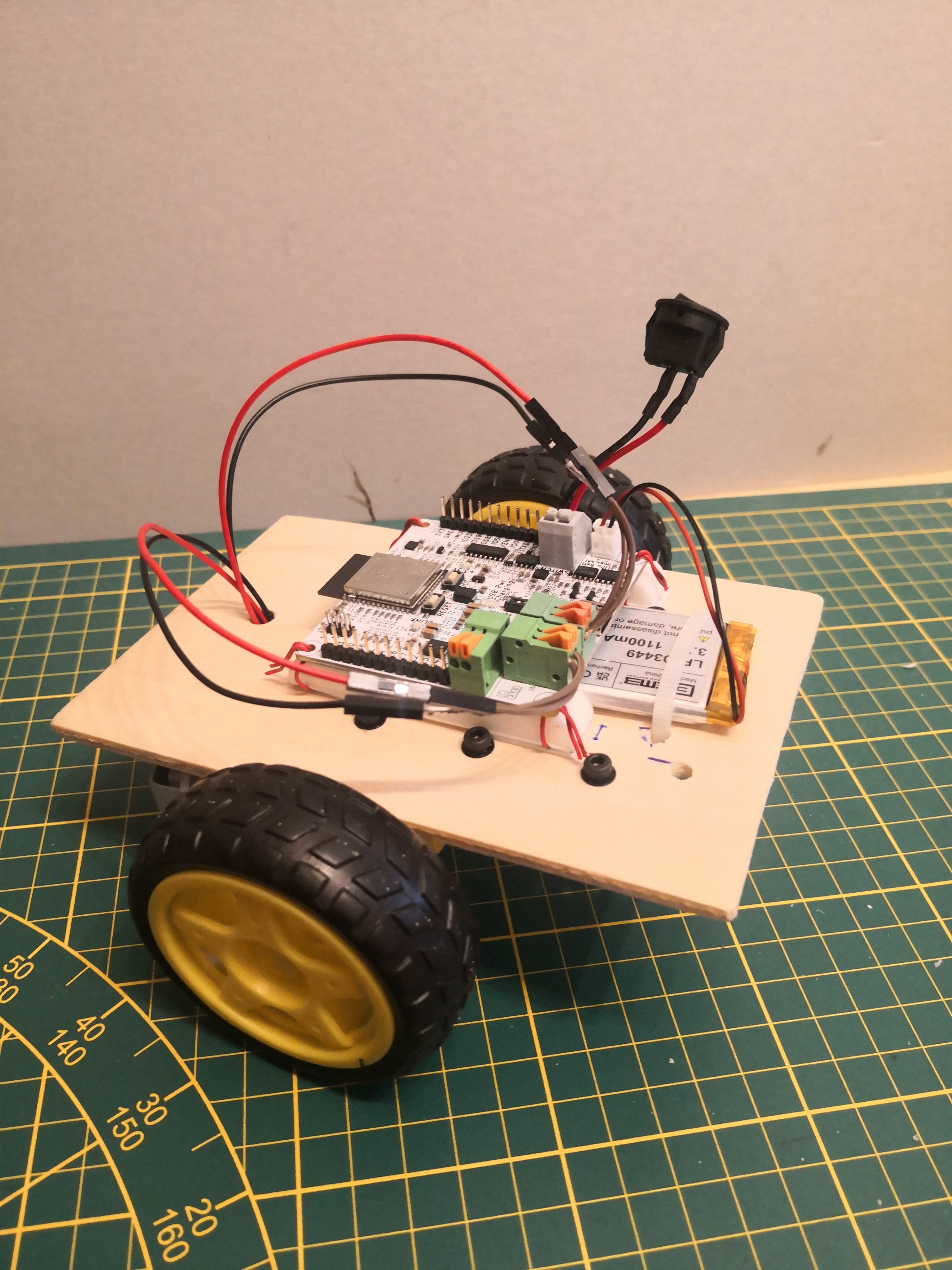
Quote from AREvgeni on October 31, 2024, 7:27 pmHallo AS59DE,
das klingt nach einem sehr coolen Balancing Bot!
Die richtigen Werte für den PID-Regler zu finden kann knifflig sein, die RoboHeartPIDFittingExample.ino dafür zu benutzen ist genau der richtige Ansatz, die PID-Werte über das Webinterface einzugeben, sollte eine Menge Zeit sparen.
Vielleicht helfen diese Videos beim Feinjustieren der Werte:
https://youtu.be/cjSw7sc2JKk?si=410ZB1kq35TYCQlU
https://youtu.be/xGh2a6OMHAA?si=716NNQ-QHghHLYMk
Die Videos sind nicht von uns aber ich finde sie sehr hilfreich.
Bitte beachte die ersten Sekunden nach dem Einschalten, da wird das Board kalibriert und sollte nicht bewegt werden. Wenn die Motoren anfangen zu arbeiten, dann kann man den Bot in die gewünschte Ausgangsstellung bringen. Wenn das Board in der gewünschten Lage ist, muss man den Boot-Button kurz drücken. Der Roboter wird dann versuchen in die Lage zurückzukehren, in der er beim Drücken des Bott-Buttons war.
Zu Frage 1:
Ja, für das Laden des Akkus muss das Board eingeschaltet bleiben. In früheren Prototypversionen des RoboHearts gab es kleine Dip-Switch Schalter für den sleep-pin der Motortreiber, aber den mussten wir aus Platzgründen in der finalen Version weglassen.
Entweder klemmt man die Motoren ab bzw. baut einen Schalter dazwischen wie schon von dir vorgeschlagen wurde. Oder man setzt die PID-Werte über das Webinterface alle auf Null, dann sollten die Motoren Ruhe geben. Man kann auch zum Laden einen anderen Sketch auf das RoboHeart hochladen, der die Motoren nicht benutzt wie z.B. RoboHeartLED.
Zu Frage 2:
Grundsätzlich ist es besser den Schwerpunkt in der Gesamtkonstruktion nach unten zu verlagern, und das Board weiter weg vom Schwerpunkt. Das heißt, das RoboHeart sollte eher über der Radachse sein und der Akku und die Motoren sollten unten bleiben. So ist unser Balancing Bot Gehäuse ausgelegt, was du unter https://augmented-robotics.com/downloads/ findest.
Wir werden demnächst Tutorials veröffentlichen, wo auch der Balancing Bot besser erklärt ist. Es sind auch weitere Updates der Bibliothek geplant, die die Sensordaten besser aufbereiten, dadurch kann der Bot nochmal verbessert werden.
LG Evgeni
Hallo AS59DE,
das klingt nach einem sehr coolen Balancing Bot!
Die richtigen Werte für den PID-Regler zu finden kann knifflig sein, die RoboHeartPIDFittingExample.ino dafür zu benutzen ist genau der richtige Ansatz, die PID-Werte über das Webinterface einzugeben, sollte eine Menge Zeit sparen.
Vielleicht helfen diese Videos beim Feinjustieren der Werte:
https://youtu.be/cjSw7sc2JKk?si=410ZB1kq35TYCQlU
https://youtu.be/xGh2a6OMHAA?si=716NNQ-QHghHLYMk
Die Videos sind nicht von uns aber ich finde sie sehr hilfreich.
Bitte beachte die ersten Sekunden nach dem Einschalten, da wird das Board kalibriert und sollte nicht bewegt werden. Wenn die Motoren anfangen zu arbeiten, dann kann man den Bot in die gewünschte Ausgangsstellung bringen. Wenn das Board in der gewünschten Lage ist, muss man den Boot-Button kurz drücken. Der Roboter wird dann versuchen in die Lage zurückzukehren, in der er beim Drücken des Bott-Buttons war.
Zu Frage 1:
Ja, für das Laden des Akkus muss das Board eingeschaltet bleiben. In früheren Prototypversionen des RoboHearts gab es kleine Dip-Switch Schalter für den sleep-pin der Motortreiber, aber den mussten wir aus Platzgründen in der finalen Version weglassen.
Entweder klemmt man die Motoren ab bzw. baut einen Schalter dazwischen wie schon von dir vorgeschlagen wurde. Oder man setzt die PID-Werte über das Webinterface alle auf Null, dann sollten die Motoren Ruhe geben. Man kann auch zum Laden einen anderen Sketch auf das RoboHeart hochladen, der die Motoren nicht benutzt wie z.B. RoboHeartLED.
Zu Frage 2:
Grundsätzlich ist es besser den Schwerpunkt in der Gesamtkonstruktion nach unten zu verlagern, und das Board weiter weg vom Schwerpunkt. Das heißt, das RoboHeart sollte eher über der Radachse sein und der Akku und die Motoren sollten unten bleiben. So ist unser Balancing Bot Gehäuse ausgelegt, was du unter https://augmented-robotics.com/downloads/ findest.
Wir werden demnächst Tutorials veröffentlichen, wo auch der Balancing Bot besser erklärt ist. Es sind auch weitere Updates der Bibliothek geplant, die die Sensordaten besser aufbereiten, dadurch kann der Bot nochmal verbessert werden.
LG Evgeni


CONTACT
Augmented Robotics GmbH Bismarckstraße 10 – 12 10625 Berlin Germany
+49 (0)30 590-083296

This project is co-financed by the European Regional Development Fund [ERDF]